

高壓開關柜在線監測系統的設計與研究
高壓開關柜在線監測系統的設計與研究詳細資料由專業的低壓開關柜、低壓配電柜、低壓配電箱報價廠家為您提供。
泉州市宜興電力有限公司研究員鄭小妹在2017年第7期《電氣技術》雜志上撰文指出,智能高壓開關柜是智能電網的重要組成部分,是電力系統的核心保護和控制設備。
原有的高壓開關柜結構簡單,需要人工檢測和控制,特別是電流測量精度低,接口兼容性差,難以適應快速發展的智能電網。因此,需要一種新型的高壓開關柜在線監測系統來有效地監測和控制開關柜。
根據高壓開關柜的應用要求,本文從軟件和硬件兩方面研究了一套高壓柜在線監測系統,具有一定的應用價值。
高壓開關柜的原始功能相對簡單。它只能顯示用戶終端的電壓和電流值,甚至市場上也有通過指針表顯示的產品。隨著智能電網建設的深入,智能高壓開關柜必將成為市場應用的主流。
摘要:介紹了智能0+監控系統,從硬件和軟件兩方面對智能高壓0+監控系統進行了設計和研究,并分析了其抗干擾措施,對高壓0+的智能化發展具有一定的參考意義。
1高壓開關柜監控系統的設計
1.1高壓開關柜監控系統的整體架構
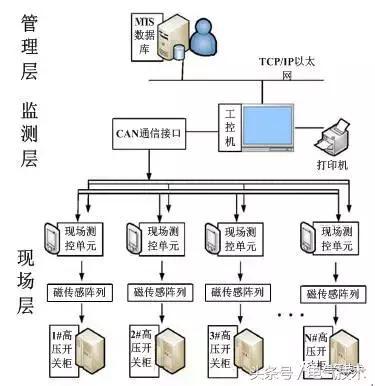
高壓開關柜監控系統采用面向對象的監控系統架構,主要由現場層、監控層和管理層組成。現場層的主要設備包括現場監控單元、傳感器和相關的輔助部件。其重要功能是高壓開關柜的現場監測。現場層和檢測層通過總線連接,實現監控數據和控制命令的傳輸。監控層和電站控制中心通過以太網連接。監控層的主要設備是監控主機、路由器、打印機等相關設備。監控層和管理層之間的數據通信通過以太網完成。下圖為高電壓開關柜時監控系統的結構圖。
圖1高壓開關柜監控系統結構圖
1.2 開關柜監控設備硬件設計
開關柜監控裝置安裝在高壓開關柜的儀表室內,主要負責高壓開關柜的數據測量、保護控制、參數顯示、網絡通訊等功能,并提供人機交互界面。主要測量和計算傳感器陣列和變壓器信號,以獲得電壓和電流值。
當系統過載時,過載保護信號會及時發送到斷路器。監控裝置采用雙CPU結構,主要由1#主控保護單片機和2#監控保護單片機組成。這兩個處理器通過一個雙端口內存實現內存空間共享。監控裝置的硬件結構圖如下圖所示。
圖2監控裝置的硬件結構圖
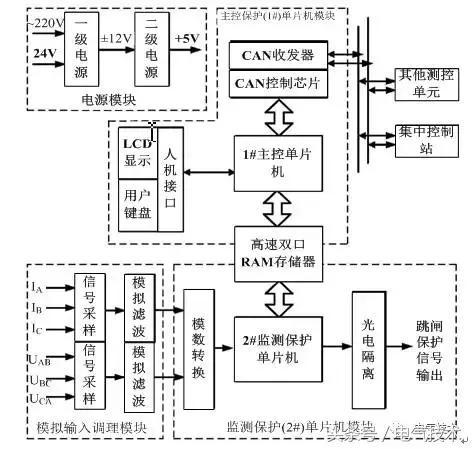
可以看出,該裝置的硬件主要包括1#主控保護單片機、2#監控保護單片機、模擬量接口、電源模塊等部分。傳感器的模擬信號由調節模塊轉換為0-10V信號。2#監控保護單片機控制A/D采集芯片采集模擬信號,并將采集的數據存儲在存儲器中,監控系統的電壓、電流信號以及短路、過載等故障。
當發生故障時,設備根據計算和分析執行故障保護和報警信號發出等動作。2#單片機的信號采集功能完成后,1#主控保護單片機取出存儲器中的值,計算出當前的電壓和電流值,并顯示在液晶顯示器上。此外,1#單片機還負責CAN通信功能。電壓模塊提供設備運行所需的5V和12V電壓。
1模擬信號處理電路。
該裝置的電流測量采用磁傳感器矩陣法,在進行運算處理之前,需要對TMR傳感器的信號進行調理和轉換。由于傳感器的輸出信號電壓約為600毫伏,需要進行大處理,放大7倍至4.2伏,剩余的電壓裕量作為過載電流和沖擊電流的報警間隔。由于系統的操作環境受到嚴重干擾,放大器應安裝在傳感器探頭中,并由12V電壓供電。
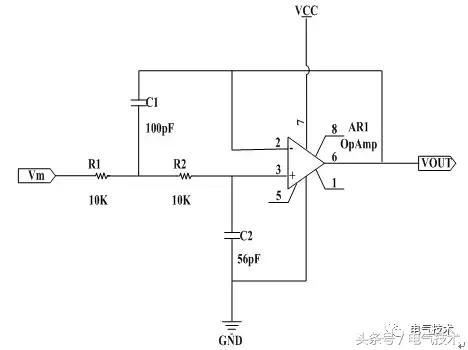
此外,TMR傳感器是一種新型的磁阻效應傳感器。與其他監測設備相比,TMR傳感器具有溫度穩定性好、靈敏度高、線性范圍寬、功耗低等特點。片式溫度傳感器體積小,成本低,非常適合于印刷電路板的設計。然而,TMR傳感器輸出信號中存在大量高頻干擾信號,需要在采樣前進行濾波。巴特沃斯濾波器是較常用的濾波器,具有平坦的通帶和出色的濾波性能。
本文采用模擬低通濾波電路,其原理圖如下圖所示。
圖3該裝置的低通濾波電路示意圖
以上,我們已經分析了該設備的主要硬件,將不再詳細介紹系統的其他硬件部分。
1.3監控系統軟件的總體設計
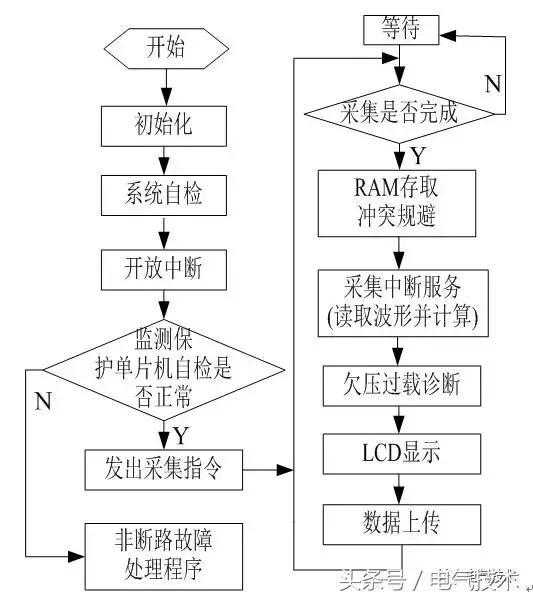
2#監控保護單片機的主要外圍硬件電路包括A/D采集芯片、高速雙端口RAM和保護驅動電路。單片機上電復位后,首先對外圍設備進行初始化操作,然后檢測整個系統,確認正常后,執行信號采集程序采集電壓和電流信號。在完成信號的循環采集和存儲之后,主芯片可以執行操作處理操作。
系統主控中央處理器程序流程如下圖所示。監控保護單片機的采集程序運行后,只有在系統因短路等嚴重故障被監控到有跳閘保護或主控中央處理器發出停止中斷命令后,采集才會中斷。
圖4主控CPU主程序流程圖
另外,1#主控單片機的主要功能是控制監控單元和數據的操作和輸出。系統通電并復位后,1 #中央處理器初始化系統并執行自檢。然后,檢測2 #中央處理器是否完成準備工作。整個系統準備就緒后,1 #中央處理器向2 #中央處理器發送信號采集信號。每當2 #中央處理器完成一個信號采集周期,它將發送一個中斷信號。此時,1 #中央處理器讀取數據,計算電壓和電流值,并將計算結果傳送給上位機。
雖然監控單元的雙CPU架構的硬件配置較低,但它可以執行多任務監控。為了保證兩個處理器之間的協調,處理器之間需要協商一個握手協議,兩個處理器之間的通信和握手是通過一個通信端口和一個外部中斷來完成的。2 #中央處理器通過兩個中斷連接到1 #中央處理器:采集完成中斷和故障報警中斷。1號中央處理器到2號中央處理器有一個停止中斷信號。
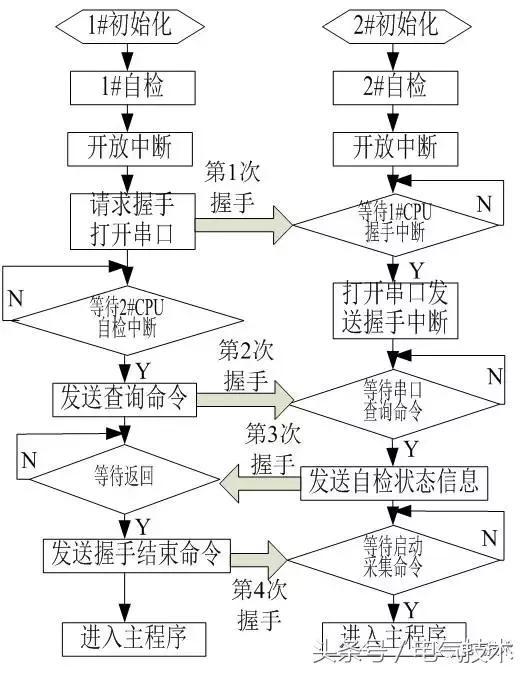
握手將在中央處理器自檢和線路故障期間進行。下面將以自檢為例解釋握手過程。復位或通電后,中央處理器分別執行初始化和自檢。2 #中央處理器自檢完成后,打開的中斷向1#主中央處理器發送自己的狀態。1 #中央處理器進入自檢狀態,打開串口,發送代碼查詢2 #中央處理器。在接收到查詢命令后,2 #中央處理器繼續向1 #中央處理器發送狀態代碼,直到它從1 #中央處理器接收到狀態接收成功的返回代碼。
自檢確認完成后,1 #中央處理器向2 #中央處理器發出信號采集啟動命令,系統開始運行,否則會出現相應的故障報警顯示。CPU自檢中斷握手過程如下。
圖5自檢握手過程
1.4系統測試
首先,對中央處理器進行在線調試,通過程序中的脈沖觸發時序計算各功能模塊的運行時間。我們記錄系統是否能在一個采集周期內實現一次有效值計算、兩次液晶屏刷新、一次數據上傳和一次按鍵響應,而不影響監控和保護中央處理器的中斷響應。測試后,系統各功能模塊的極限消耗時間如下表所示。
表1系統功能模塊的極限消耗時間

由于上述功能通常在不同的掃描周期內完成,系統的掃描周期約為15毫秒,因此系統的執行效率滿足要求。
然后測試系統的功能,測試電流由大電流發生器提供,羅果夫斯基線圈提供電流標準值,并記錄監控裝置的電流值。橫坐標是標準電流有效值,縱坐標是顯示電流有效值。在測試中,系統范圍分為兩種類型:峰值0-50A和50-1200A。測試結果如下圖所示。
圖6系統測試電流測量結果圖
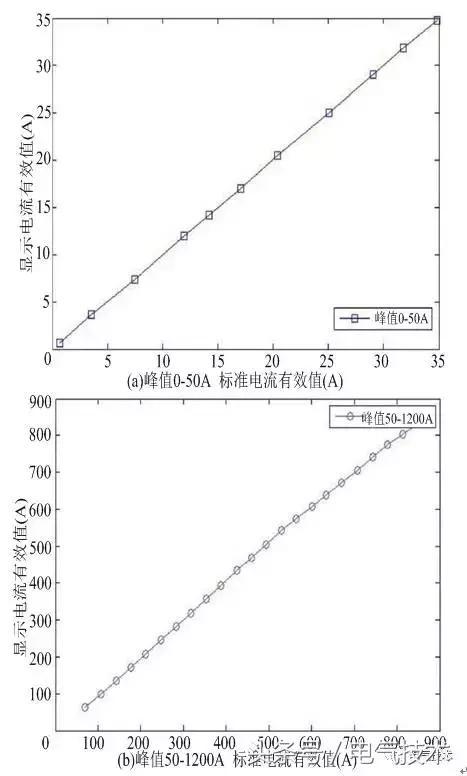
從測試結果可以看出,在峰值0-50 a范圍內,系統的較大誤差為1.1A,在50-1200A范圍內,由于干擾,較大誤差為2.3A,誤差率為0.192%,精度達到0.2級,滿足系統的測量要求。
為了進一步驗證設備的可靠性,該系統在不同的天氣條件下進行了多次測試。下表顯示了較大誤差結果。該系統仍能滿足0.2級監測的要求,重復性好。
表2重復實驗結果
系統的當前監控只是監控設備的基本功能。該系統作為綜合智能監控裝置,還應集成高壓柜的電壓監控、柜內觸點和溫度監控開關的狀態監控以及運行安全聯鎖功能。只需在系統中增加相應的檢測模塊和輔助電路,并結合相應的程序功能塊即可。
應當注意,隨著功能變得更加復雜,可能需要選擇具有更快操作速度的單個芯片來提高系統操作速度并滿足執行效率的要求。高壓柜的遠程監控可以通過設備的通信接口和變電站智能監控系統的聯網來實現。
結論
高壓開關柜是電力系統保護和控制的核心設備。隨著智能電網的建設,高壓開關柜運行狀態的智能監控變得越來越重要。本文根據以往的工作經驗,從硬件和軟件兩方面設計了一種智能高壓開關柜監控系統。根據系統運行的環境特點,分析了系統的抗干擾措施,并通過測試測試了系統的測量精度,對高壓開關柜智能監控系統的設計和應用具有一定的參考意義。
更多選型規格報價定制等問題可及時聯系廠家,以上就是高壓開關柜在線監測系統的設計與研究全部內容。



